[CVPR15] Understanding Tools: Task-Oriented Object Modeling, Learning and Recognition
Abstract
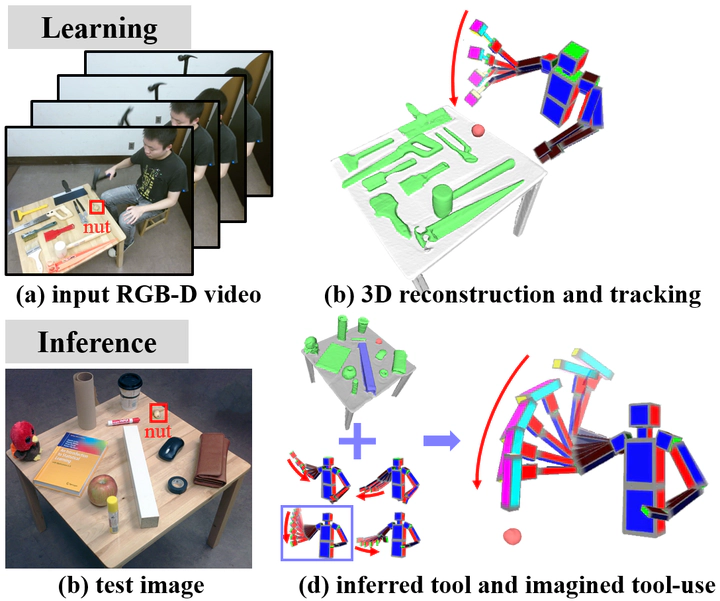
In this paper, we present a new framework for task-oriented object modeling, learning and recognition. The framework include: i) spatial decomposition of the object and 3D relations with the imagine human pose; ii) temporal pose sequence of human actions; iii) causal effects (physical quantities on the target object) produced by the object and action. In this inferred representation, only the object is visible, and all other components are imagined “dark” matters. This framework subsumes other traditional problems, such as: (a) object recognition based on appearance and geometry; (b) action recognition based on poses; (c) object manipulation and affordance in robotics. We argue that objects, especially man-made objects, are designed for various tasks in a broad sense, and therefore it is natural to study them in a task-oriented framework.