[ICRA19] Self-Supervised Incremental Learning for Sound Source Localization in Complex Indoor Environment
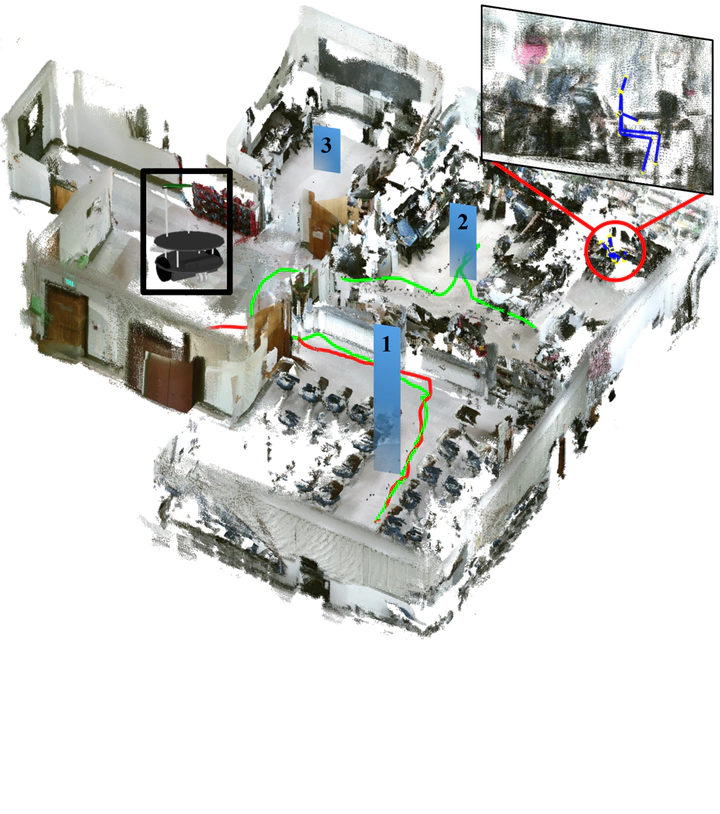 A typical indoor environment consisting of multiple rooms. Given a verbal command from a user, the proposed incremental learning framework ranks the priority of the rooms to be explored, indicated by the height of the blue bars. In this example, the robot initially explores the wrong room following the red path, which serves as a negative sample. Following the ranking order, it continues to explore the second room with the green path. A detection of the user leads to a positive labeled sample of the training data. All the positive and negative data is labeled on-the-fly to adapt to new users in unknown complex indoor environments, and is accumulated to refine the current model to improve future prediction accuracy.
A typical indoor environment consisting of multiple rooms. Given a verbal command from a user, the proposed incremental learning framework ranks the priority of the rooms to be explored, indicated by the height of the blue bars. In this example, the robot initially explores the wrong room following the red path, which serves as a negative sample. Following the ranking order, it continues to explore the second room with the green path. A detection of the user leads to a positive labeled sample of the training data. All the positive and negative data is labeled on-the-fly to adapt to new users in unknown complex indoor environments, and is accumulated to refine the current model to improve future prediction accuracy.Abstract
This paper presents an incremental learning framework for mobile robots localizing the human sound source using a microphone array in a complex indoor environment consisting of multiple rooms. In contrast to conventional approaches that leverage direction-of-arrival (DOA) estimation, the framework allows a robot to accumulate training data and improve the performance of the prediction model over time using an incremental learning scheme. Specifically, we use implicit acoustic features obtained from an auto-encoder together with the geometry features from the map for training. A self-supervision process is developed such that the model ranks the priority of rooms to explore and assigns the ground truth label to the collected data, updating the learned model on-the-fly. The framework does not require pre-collected data and can be directly applied to real-world scenarios without any human supervisions or interventions. In experiments, we demonstrate that the prediction accuracy reaches 67% using about 20 training samples and eventually achieves 90% accuracy within 120 samples, surpassing prior classification-based methods with explicit GCC-PHAT features.