Abstract
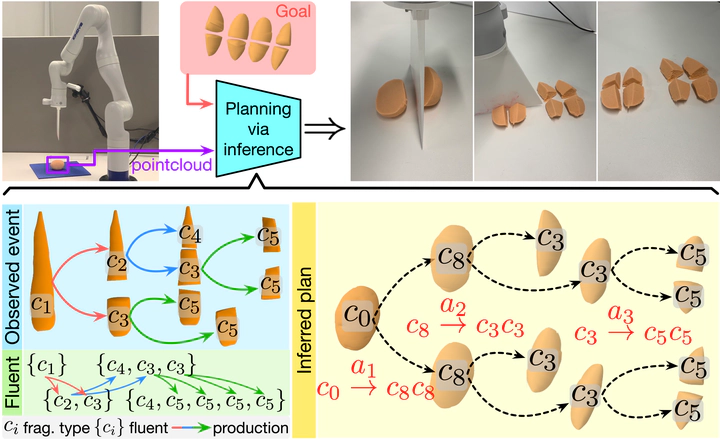
Cutting objects into desired fragments is challenging for robots due to the spatially unstructured nature of fragments and the complex one-to-many object fragmentation caused by actions. We present a novel approach to model object fragmentation using an attributed stochastic grammar. This grammar abstracts fragment states as node variables and captures causal transitions in object fragmentation through production rules. We devise a probabilistic framework to learn this grammar from human demonstrations. The planning process for object cutting involves inferring an optimal parse tree of desired fragments using the learned grammar, with parse tree productions corresponding to cutting actions. We employ Monte Carlo Tree Search (MCTS) to efficiently approximate the optimal parse tree and generate a sequence of executable cutting actions. The experiments demonstrate the efficacy in planning for object-cutting tasks, both in simulation and on a physical robot. The proposed approach outperforms several baselines by demonstrating superior generalization to novel setups, thanks to the compositionality of the grammar model.